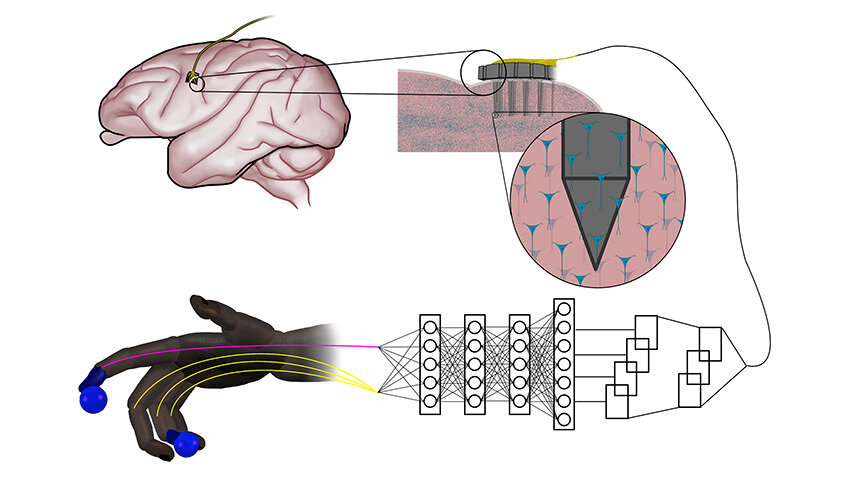

Las matrices intracorticales en la corteza motora transmiten los potenciales de acción de las neuronas biológicas a las redes neuronales artificiales en las computadoras que usan esta información para predecir y controlar los movimientos de los dedos protésicos. Crédito: UM
Las redes neuronales artificiales inspiradas en los circuitos nerviosos naturales del cuerpo humano dan a los primates un control más rápido y preciso de las manos y dedos protésicos controlados por el cerebro, según han demostrado investigadores de la Universidad de Michigan. El hallazgo podría conducir a un control más natural sobre las prótesis avanzadas para quienes enfrentan la pérdida de una extremidad o parálisis.
El equipo de ingenieros y médicos descubrió que una red neuronal de alimentación hacia adelante mejoró la velocidad máxima de los dedos en un 45 % durante el control de los dedos robóticos en comparación con los algoritmos tradicionales que no usan redes neuronales. Esto anuló la suposición de que se necesitarían redes neuronales más complejas, como las que se utilizan en otros campos del aprendizaje automático, para lograr este nivel de mejora del rendimiento.
«Esta red de alimentación hacia adelante representa una arquitectura más antigua y simple, con información que se mueve solo en una dirección, desde la entrada hasta la salida», dijo Cindy Chestek, Ph.D., profesora asociada de ingeniería biomédica en la UM y autora correspondiente del artículo. en Comunicaciones de la naturaleza.
«Por lo tanto, fue una sorpresa para nosotros ver cómo superó a los sistemas más complejos. Sentimos que la simplicidad del sistema de avance le permite al usuario tener un control más directo e intuitivo que puede estar más cerca de cómo funciona el cuerpo humano de forma natural. .»
Las habilidades motoras finas son extremadamente importantes para los humanos, y la pérdida de esta función puede ser devastadora para las personas con parálisis, dijo el primer autor Matthew Willsey, MD, Ph.D., becario de neurocirugía funcional en University of Michigan Health, Michigan Medicine.
«Estamos muy motivados para utilizar las últimas técnicas en aprendizaje automático para interpretar la actividad neuronal del cerebro para el control de los movimientos diestros de los dedos», dijo Willsey. «Esperamos que esta línea de trabajo pueda ayudar a restaurar el funcionamiento motor fino de aquellos que lo han perdido».
Las prótesis avanzadas y las interfaces cerebro-computadora prometen devolver el control preciso que permite la mano humana a las personas con parálisis que podrían ser causadas por lesiones en la médula espinal, accidentes cerebrovasculares u otras lesiones y enfermedades. Pero recrear el flujo natural de comunicación entre la mente humana y una prótesis robótica, con velocidad y precisión, sigue siendo un obstáculo.
En las lesiones de la médula espinal, por ejemplo, las redes neuronales creadas por el hombre pueden recrear la conexión cortada entre el cerebro y la médula espinal mediante el uso de electrodos para capturar impulsos del cerebro, interpretarlos con inteligencia artificial y utilizarlos para controlar prótesis de manos o reanimar a los nativos. miembro.
Pero en computación, se cree que el modelo de red neuronal feed-forward es menos poderoso para muchas aplicaciones avanzadas que usan redes neuronales recurrentes. En lugar de pasar la entrada a lo largo de una procesión unidireccional, los nodos en las redes recurrentes tienen su propia dinámica: la capacidad de crear sus propios ciclos internos a través de la retroalimentación, haciéndolos capaces de memorizar y reproducir secuencias. Esto funciona extremadamente bien cuando se predicen movimientos a partir de datos neuronales previamente registrados, lo que hace que algunos expertos asuman que esto se mantendría igual durante los experimentos novedosos.
Chestek dijo que, en realidad, la complejidad de las redes recurrentes para el control motor directo parecía «luchar contra el usuario».
«No hay nada más que un par de neuronas y un par de sinapsis entre la corteza motora y los movimientos de las manos en el cuerpo humano», dijo. «No se necesita una tonelada de procesamiento allí, y la red neuronal de avance puede parecerse más al sistema natural».
El equipo espera que sus hallazgos ayuden a impulsar futuras investigaciones que puedan mejorar la velocidad y la precisión con la que las prótesis avanzadas responden a los impulsos del cerebro.
«Al desarrollar este algoritmo, tratamos de mantenernos fieles al conocido principio de diseño de Einstein de que ‘todo debe hacerse lo más simple posible, pero no más simple'», dijo Willsey.
«Nuestro algoritmo debe tener la complejidad suficiente para comprender la posible relación no lineal entre las señales eléctricas del cerebro y los movimientos de los dedos previstos por el usuario. Sin embargo, el algoritmo algún día puede ser parte de un sistema de interfaz cerebro-máquina totalmente implantable que restaura el movimiento a las personas con parálisis y la complejidad innecesaria pueden estresar estos sistemas futuros de formas no deseadas, como acortando la vida útil de la batería».
«En la Universidad de Michigan, tenemos la suerte de contar con un gran grupo de ingenieros, neurocientíficos y expertos en movimiento que se asocian en una cultura de colaboración para hacer avanzar el campo de la neuroingeniería restauradora», dijo Parag Patil, MD, Ph.D. ., autor principal del estudio y profesor asociado de neurocirugía en la Facultad de Medicina de la Universidad de Michigan. «Parte de la emoción de este trabajo es que estos algoritmos se pueden trasladar casi de inmediato a la cabecera de la cama para el beneficio de los pacientes de investigación humanos».
Más información:
Matthew S. Willsey et al, La interfaz cerebro-máquina en tiempo real en primates no humanos logra movimientos de dedos protésicos de alta velocidad utilizando un decodificador de red neuronal de avance superficial, Comunicaciones de la naturaleza (2022). DOI: 10.1038/s41467-022-34452-w
Citación: Las redes neuronales simples superan a los sistemas más complejos para controlar prótesis robóticas (17 de enero de 2023) consultado el 17 de enero de 2023 en https://medicalxpress.com/news/2023-01-simple-neural-networks-outperform-complex.html
Este documento está sujeto a derechos de autor. Aparte de cualquier trato justo con fines de estudio o investigación privados, ninguna parte puede reproducirse sin el permiso por escrito. El contenido se proporciona únicamente con fines informativos.


