La búsqueda de daños o agujeros en las redes de las jaulas marinas es una de las operaciones de rutina más importantes que se llevan a cabo en el sector de la acuicultura. Los grandes avances tanto en el aprendizaje automático como en el llamado aprendizaje profundo nos han proporcionado métodos automatizados para la inspección de redes. Crédito: SFI Expuesto/SINTEF
La inteligencia artificial puede ser de gran beneficio bajo el agua y SINTEF, en colaboración con el centro de investigación SFI Exposed, está desarrollando sistemas que ayudarán a mejorar la seguridad de las piscifactorías en condiciones marinas adversas.
Es posible que ya haya oído hablar del aprendizaje profundo. Es un proceso clave en el campo del aprendizaje automático, que permite a las computadoras expandir sus capacidades en respuesta a la información que se les proporciona. Al exponer el cerebro de una computadora a conceptos que debe comprender, se le puede enseñar a reconocer información contextual. En una estructura de datos modelada en el cerebro humano, los dispositivos están vinculados para formar lo que llamamos una red neuronal. Estas redes están formadas por muchas capas que interactúan para permitir lo que llamamos aprendizaje profundo.
Hemos utilizado este concepto para desarrollar y mejorar los sistemas que pueden identificar irregularidades en las redes de las jaulas de salmón en las piscifactorías. Hacemos esto alimentando una red neuronal digital con imágenes que muestran los componentes básicos de una red intacta. Estas imágenes permiten que el programa reaccione cuando observa algo fuera de lo común, como un agujero.
Los peces escapados son un problema importante
Las inspecciones frecuentes de las redes de las jaulas marinas, suspendidas bajo el agua, están destinadas a ayudar a evitar que los peces se escapen. El salmón de piscifactoría que escapa puede transmitir enfermedades y también puede migrar río arriba junto con los peces silvestres, perturbando y participando en el proceso de desove. Estos factores solo sirven para debilitar las poblaciones de salmón salvaje, por lo que es de interés de todos evitar escapes de las jaulas marinas.
El gobierno noruego notificó recientemente que tiene la intención de introducir requisitos técnicos más estrictos para el diseño y la operación a prueba de escapes de las piscifactorías. Estas nuevas regulaciones no dejan ninguna duda de que tenemos que pensar de manera innovadora y pueden ofrecernos oportunidades para aplicar o desarrollar más algunos de los conceptos en los que estamos trabajando actualmente en el centro de investigación SFI Exposed.
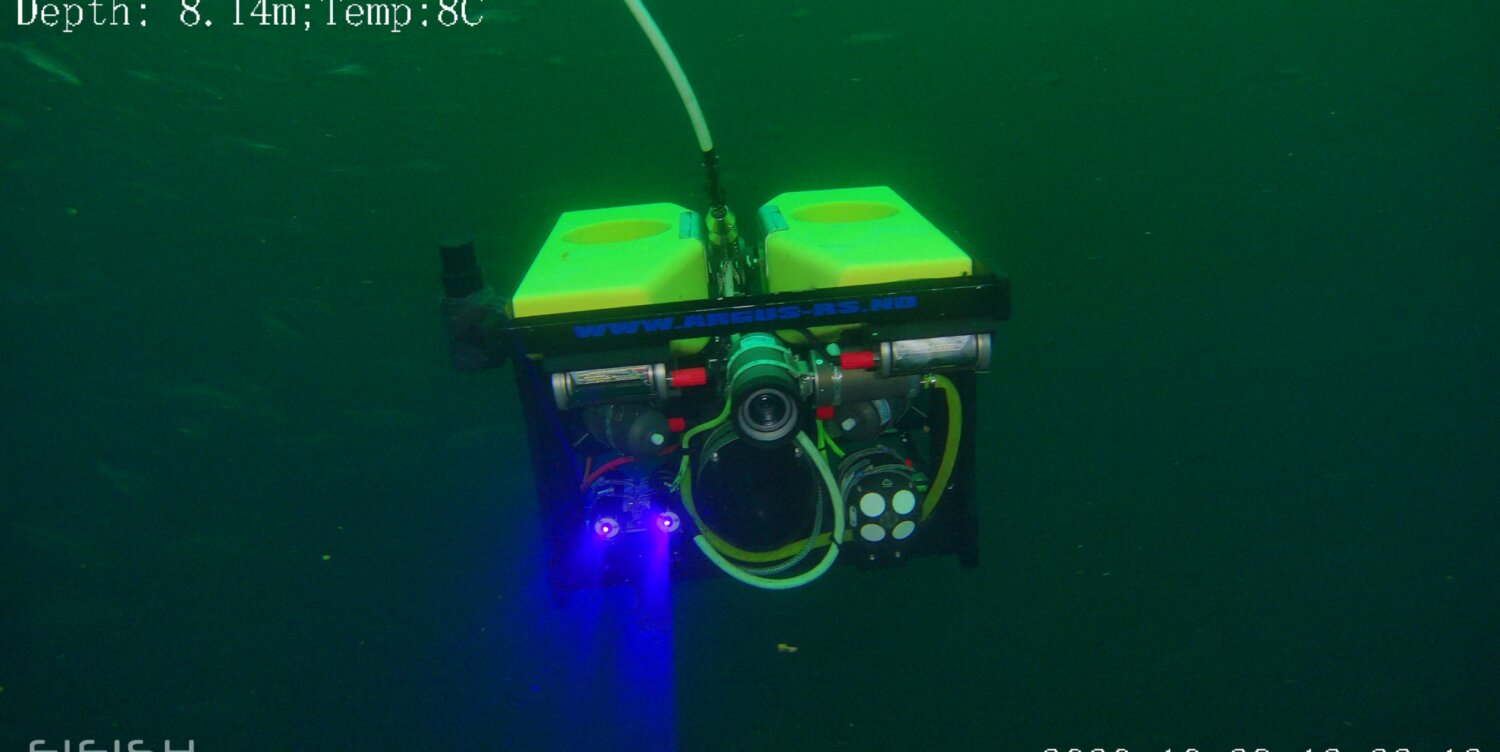
Las operaciones estándar actuales implican el uso de un vehículo operado remotamente (ROV) montado en una cámara que se lanza a una jaula y es manipulado por un operador que luego inspecciona las imágenes transmitidas. Es difícil para un operador concentrarse durante horas mirando un conjunto monótono de imágenes de video de redes submarinas. El cerebro de una computadora, por otro lado, nunca se cansa ni se aburre, por lo que tales operaciones son ideales para la aplicación de vehículos autónomos que utilizan el reconocimiento de imágenes.
Cuando un cerebro de computadora es mejor que un cerebro humano
Independientemente de si las imágenes serán evaluadas por humanos o máquinas, todavía necesitamos tomar películas de video de la red de la jaula marina. Navegar un ROV a lo largo de una red de jaula marina es una tarea técnicamente exigente. La cámara del vehículo debe acercarse lo suficiente para obtener imágenes claras sin chocar con la pared de la red.
Nuestros colegas de investigación que trabajan con sistemas y tecnologías autónomos para su uso en áreas remotas han estado investigando los tipos de tecnología de sensores que pueden permitir que un ROV determine su posición espacial dentro de una jaula marina. Esta información es clave para identificar qué parte de la red se está inspeccionando en un momento dado.
Es esencial que un ROV sepa exactamente dónde está para todo tipo de operaciones autónomas. Puede que tenga que mantener una posición estable frente a fuertes corrientes y alta mar, o rastrear a través de la pared de la red a una distancia fija predeterminada.
El resultado de toda esta investigación es un sistema de cámara láser para la llamada navegación relativa a la red. La información sobre la distancia y la orientación angular del ROV a la red se obtiene con la ayuda de dos rayos láser paralelos que iluminan la pared de la red. Estas medidas son esenciales si el ROV debe mantener una distancia adecuada de la pared de la red sin que el operador tenga que hacer ajustes de dirección cada vez que la red se mueve debido a las corrientes o al movimiento de las olas. Se está llevando a cabo una gran cantidad de investigación y desarrollo emocionantes en operaciones robóticas autónomas, tanto en centros de investigación como en entornos industriales. En SINTEF, vemos esto como el comienzo de un viaje de desarrollo de sistemas que mejorará las operaciones en el sector de la acuicultura.
Contacto cercano peligroso
SFI Exposed es un centro de innovación basado en la investigación que trabaja en muchos campos con una variedad de perspectivas sobre los desafíos que enfrentan las operaciones de acuicultura en alta mar en entornos expuestos. Nuestros colegas que investigan aspectos de seguridad han revelado que puede haber cierta superposición entre los incidentes que aumentan el riesgo de escapes de peces y los que amenazan la seguridad de los empleados de las instalaciones.
Creemos que cuando se trata de seguridad, es importante tener en cuenta el panorama general, y que el enfoque más efectivo es tener en cuenta todos los aspectos desde la etapa de desarrollo del producto. Si la seguridad de los empleados está integrada en la tecnología de tal manera que sea imposible causar un peligro por un uso incorrecto, habremos reducido efectivamente el riesgo de incidentes que resulten tanto en escapes de peces como en lesiones a los empleados.
Pero ya que estamos hablando de riesgo. Claramente, un ROV no establece requisitos de HSE. Sin embargo, las consideraciones de HSE son esenciales para el personal cuyo trabajo es liberar ROV en jaulas para peces y recuperarlos nuevamente. Esta tarea parece bastante simple, pero requiere que una embarcación montada en una grúa se acerque y se amarre contra la jaula. En muchas situaciones, se debe desplegar personal a lo largo del anillo flotante para liberar el ROV, un trabajo que implica un levantamiento muy difícil.
El movimiento entre el buque y la jaula es una empresa arriesgada en el mejor de los casos, y es precisamente en esas situaciones cuando ocurren muchos accidentes relacionados con el sector. En lugares sujetos a grandes movimientos y aceleraciones debido a fuertes corrientes, alta mar y vientos, y donde las embarcaciones y la infraestructura de las instalaciones son más grandes que en sitios protegidos, es fundamental contar con sistemas que hagan que sea seguro moverse entre una jaula y un barco amarrado.
Un brazo robótico puede hacer el trabajo
Primero estudiamos las formas en que se llevan a cabo las operaciones de grúas actuales para evaluar los riesgos y desafíos asociados. Luego pasamos a ver cómo las nuevas tecnologías podrían mejorar la situación. Un ejemplo involucra nuestros estudios de concepto para la jaula marina de ROV «Lanzamiento y recuperación». Otro es un concepto que implica el uso de un brazo robótico avanzado que permite realizar operaciones sin ningún tipo de contacto entre la embarcación y la jaula.
Imagine que la embarcación en la que está montado el brazo robótico se mueve hacia arriba y hacia abajo sobre las olas, y que la jaula marina hace lo mismo, fuera de sintonía y a cierta distancia. Un brazo robótico que pueda extenderse desde la embarcación hasta la jaula para realizar un trabajo de precisión simplemente tiene que ser una impresionante pieza de equipo de alta tecnología. Pero, de hecho, es completamente posible.
Hemos utilizado experimentos modelo para demostrar cómo un brazo robótico puede compensar los movimientos relativos de una embarcación y una jaula marina. También hemos realizado valoraciones de las operaciones que se pueden realizar y de las modificaciones que se deben realizar en las instalaciones existentes para permitir la puesta en marcha de esta tecnología.
Mejor apoyo a la decisión
El riesgo de accidentes y escapes de peces puede aumentar cuando las condiciones del mar son peores de lo previsto, como en casos de corrientes inesperadamente fuertes o mares agitados con olas poderosas. Actualmente, nuestras decisiones sobre si continuar o no con las operaciones bajo tales condiciones a menudo se toman sobre la base de la discreción y la experiencia. Los límites operacionales mejor definidos en forma de pautas sobre cuándo se pueden realizar o no las operaciones pueden contribuir de manera valiosa a mejorar la seguridad.
En SINTEF Ocean hemos estado construyendo una infraestructura para la captura de datos de boyas, embarcaciones e instalaciones en alta mar, y hemos recopilado datos meteorológicos, así como mediciones del movimiento y la calidad del agua, como medio para construir una base de datos estadística sólida. Cuanto más precisa sea la información que tengamos sobre olas, corrientes y condiciones meteorológicas, más fácil será tomar una decisión sobre si se puede o no realizar una operación. Cuando vinculamos estas estadísticas con medidas físicas y gemelos digitales, obtenemos una excelente base para la planificación operativa.
Citación: El aprendizaje profundo puede ayudar a prevenir los escapes de salmón en mares agitados (30 de diciembre de 2022) recuperado el 1 de enero de 2023 de https://phys.org/news/2022-12-deep-salmon-rough-seas.html
Este documento está sujeto a derechos de autor. Aparte de cualquier trato justo con fines de estudio o investigación privados, ninguna parte puede reproducirse sin el permiso por escrito. El contenido se proporciona únicamente con fines informativos.


