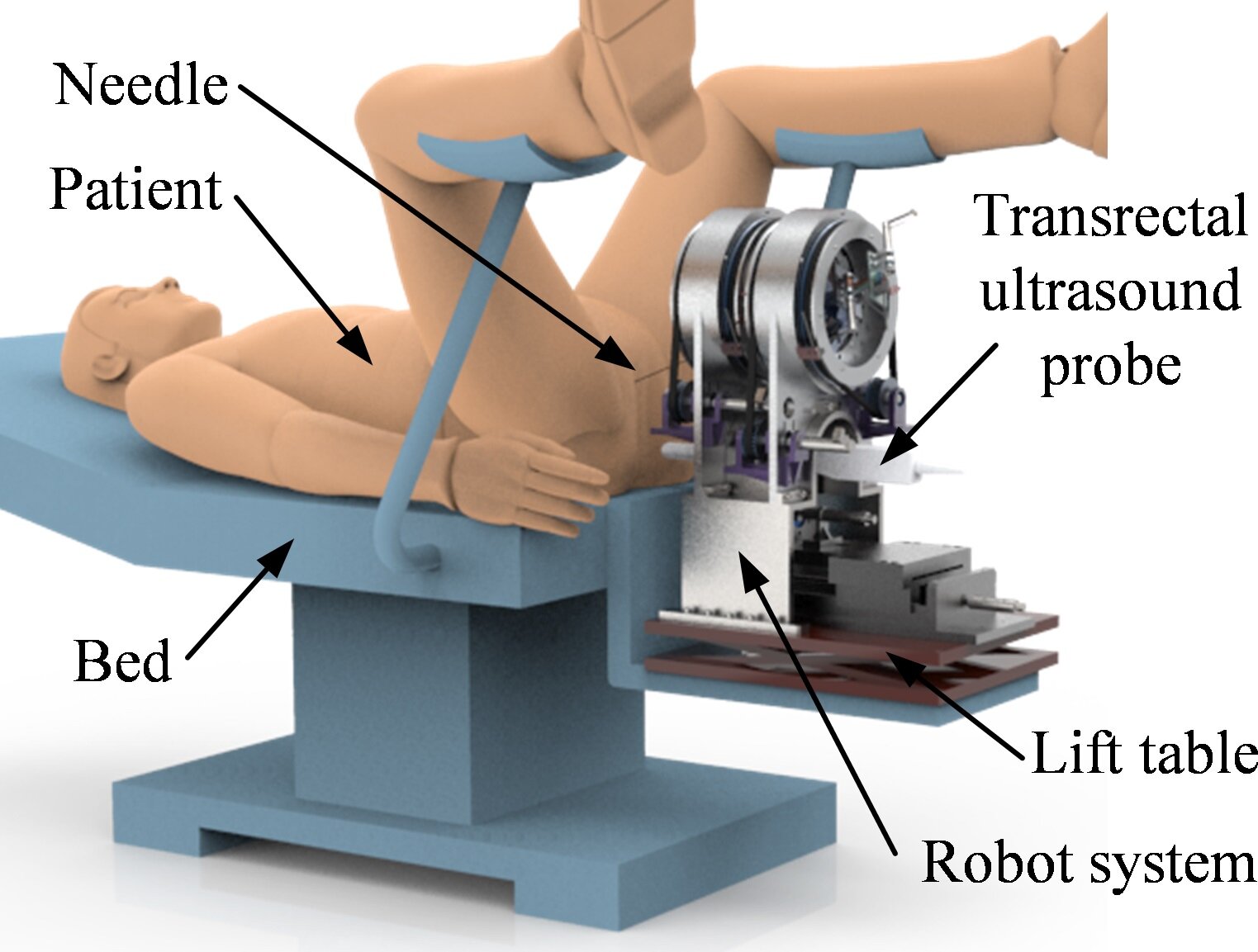

Configuración de sistema robótico 8-DOF para intervención percutánea de próstata guiada por ecografía. Crédito: Jiawen YAN, Bo PAN, Yili FU
Un equipo de investigación del Instituto de Tecnología de Harbin ha propuesto un novedoso y efectivo sistema robótico para la intervención percutánea de próstata guiada por ultrasonido. El sistema de robot de 8 articulaciones puede realizar un control completamente automático para la inserción de la próstata, que puede aplicarse potencialmente al diagnóstico y tratamiento de la próstata, como la biopsia y la braquiterapia. Este estudio publicado en la revista Fronteras de la Ingeniería Mecánica el 27 de enero de 2022.
Dado que el grupo de pacientes con enfermedad de la próstata aumenta considerablemente en los últimos años, el novedoso y rígido sistema robótico ofrece una alternativa prometedora para el proceso de intervención automática con menos intentos y traumas, y también menos dependencia de la experiencia de los operadores.
«El sistema compacto hace uso del espacio limitado para la operación de inserción de la próstata. El sistema de robot contiene 8 articulaciones para el control independiente de la manipulación de la sonda de ultrasonido, el posicionamiento de la aguja y la inserción de la aguja. La estructura paralela empleada, lo que es más importante, puede evitar posibles colisiones entre la estructura y paciente», dijo el profesor asistente Bo Pan, autor del estudio.
El grupo de investigación de los Profs. Yili Fu y Bo Pan es uno de los grupos de investigación pioneros que estudian los sistemas robóticos de cirugía guiada por imágenes médicas en China. Los sistemas de robot están diseñados para cumplir con los complejos requisitos del proceso quirúrgico y aumentar la tasa de éxito. «La aplicación de sistemas inteligentes para ayudar a los médicos a realizar operaciones con dificultades reducidas es un enfoque eficaz para mejorar nuestro proceso de tratamiento médico», dijo Pan. Y esta vez, el grupo de estudio se centra en el proceso de inserción de la próstata guiada por ecografía.
La inserción de próstata guiada por ultrasonido es un proceso generalmente utilizado para diagnosticar y tratar enfermedades de la próstata. Durante el proceso de inserción, un médico debe escanear la glándula, insertar la aguja y verificar la precisión al mismo tiempo. Una tableta puede ayudar a los médicos a reducir la dificultad de la operación; sin embargo, restringe la flexibilidad de inserción. Además, por lo general se necesitan intentos repetitivos para aumentar la precisión, lo que genera un mayor trauma e incomodidad para los pacientes. El sistema de robot de 8 articulaciones propuesto en este trabajo tiene como objetivo lograr todo el proceso de forma automática.
«El punto desafiante es que el sistema debe contener todas las funciones necesarias con un diseño compacto y rígido», explicó Pan. El sistema de nuevo diseño acomoda la sonda de ultrasonido y la aguja de inserción. La sonda de ultrasonido transrectal se puede manipular para insertarla y girarla para escanear la próstata; la aguja puede orientarse y colocarse para el ajuste de la pose e insertarse automáticamente de acuerdo con la orden del operador. Todos los movimientos son independientes para lograr una alta reflexibilidad. El diseño también consideró los requisitos generales del diseño de robots médicos, como el autobloqueo y la fácil esterilización.
«La estructura paralela para el ajuste de la posición de la aguja es un diseño novedoso y aumenta la rigidez del sistema. Sin embargo, también necesita una calibración cuidadosa», dijo Pan. La calibración es el proceso de identificación de parámetros del modelo y es importante para un control preciso. La calibración de estructuras paralelas no se puede lograr utilizando enfoques universales, y un enfoque efectivo generalmente está relacionado con el modelo específico. En el trabajo, los investigadores proponen una optimización de enjambres de partículas basada en los valores informativos de parámetros (InfoPSO) para la identificación de errores en el proceso de calibración. PSO es un método de optimización no lineal con una velocidad de cálculo rápida, pero la razonabilidad de los resultados del cálculo no se puede garantizar sin una supervisión en tiempo real. En combinación con las características de los parámetros, se puede mejorar la precisión de la identificación.
En el trabajo, el grupo de investigación construyó un prototipo para mostrar la funcionalidad. Los experimentos de verificación prueban que el sistema de robot puede realizar los movimientos necesarios en el proceso de orientación. Al aplicar el método de calibración, se construye un proceso de control razonable y confiable, y el error promedio se puede limitar a 0,963 mm para el punto de inserción, a 1,846 mm para el punto objetivo.
«Hay un largo camino por recorrer desde un prototipo hasta el producto, especialmente para un dispositivo médico. Pero todos los esfuerzos nos llevan más cerca de él. En el próximo paso nos centraremos en la mejora de la rigidez y la fabricación y el ensamblaje elaborados. El trabajo es prometiendo ser aplicado en la práctica algún día en un futuro cercano», dijo Pan con confianza. El equipo de investigación continuará mejorando el diseño de sistemas de robots y llevará a cabo más sistemas de robots médicos.
Nuevo método propuesto para la planificación preoperatoria de la trayectoria de inserción de agujas
Jiawen Yan et al, sistema de robot de intervención percutánea de próstata guiada por ultrasonido y calibración mediante optimización de enjambre de partículas informativas, Fronteras de la Ingeniería Mecánica (2022). DOI: 10.1007/s11465-021-0659-x
Proporcionado por Higher Education Press
Citación: Los investigadores describen un sistema de robot integrado para la intervención percutánea de próstata guiada por ultrasonido (13 de abril de 2022) consultado el 13 de abril de 2022 en https://medicalxpress.com/news/2022-04-robot-ultrasound-guided-prostate-percutanea-intervention. html
Este documento está sujeto a derechos de autor. Aparte de cualquier trato justo con fines de estudio o investigación privados, ninguna parte puede reproducirse sin el permiso por escrito. El contenido se proporciona únicamente con fines informativos.