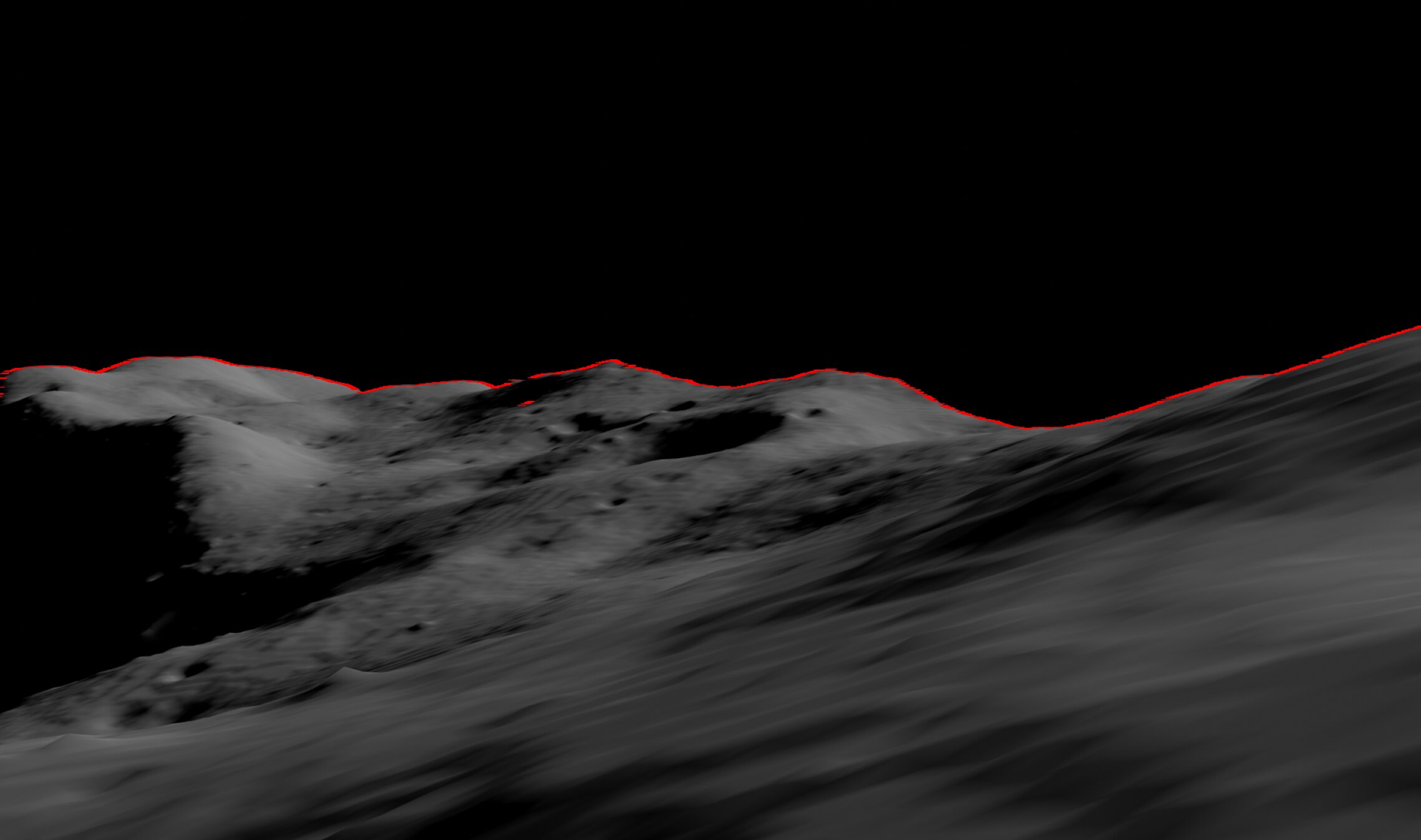
La colección de crestas, cráteres y rocas que forman un horizonte lunar puede ser utilizada por una inteligencia artificial para ubicar con precisión a un viajero lunar. Un sistema desarrollado por el ingeniero de investigación Alvin Yew proporcionaría un servicio de ubicación de respaldo para futuros exploradores, robóticos o humanos. Crédito: NASA/MoonTrek/Alvin Yew
Al igual que los puntos de referencia familiares pueden dar a los viajeros un sentido de dirección cuando sus teléfonos inteligentes pierden el bloqueo de las señales de GPS, un ingeniero de la NASA está enseñando a una máquina a usar características en el horizonte de la Luna para navegar a través de la superficie lunar.
«Para el geoetiquetado científico y de seguridad, es importante que los exploradores sepan exactamente dónde están mientras exploran el paisaje lunar», dijo Alvin Yew, ingeniero de investigación en el Centro de Vuelo Espacial Goddard de la NASA en Greenbelt, Maryland. «Equipar un dispositivo a bordo con un mapa local sería compatible con cualquier misión, ya sea robótica o humana».
La NASA está trabajando actualmente con la industria y otras agencias internacionales para desarrollar una arquitectura de comunicaciones y navegación para la Luna. LunaNet traerá capacidades «similares a Internet» a la luna, incluidos los servicios de ubicación.
Sin embargo, los exploradores en algunas regiones de la superficie lunar pueden requerir soluciones superpuestas derivadas de múltiples fuentes para garantizar la seguridad en caso de que las señales de comunicación no estén disponibles.
«Es fundamental tener sistemas de respaldo confiables cuando hablamos de exploración humana», dijo Yew. «La motivación para mí fue permitir la exploración del cráter lunar, donde todo el horizonte sería el borde del cráter».
Yew comenzó con datos del Lunar Reconnaissance Orbiter de la NASA, específicamente el Lunar Orbiter Laser Altimeter (LOLA). LOLA mide las pendientes, la rugosidad de la superficie lunar y genera mapas topográficos de alta resolución de la luna.
Yew está entrenando una inteligencia artificial para recrear características en el horizonte lunar como le parecerían a un explorador en la superficie lunar utilizando los modelos de elevación digital de LOLA. Esos panoramas digitales se pueden usar para correlacionar rocas y crestas conocidas con las visibles en imágenes tomadas por un rover o astronauta, proporcionando una identificación de ubicación precisa para cualquier región determinada.
«Conceptualmente, es como salir y tratar de averiguar dónde estás examinando el horizonte y los puntos de referencia circundantes», dijo Yew. «Si bien una estimación aproximada de la ubicación puede ser fácil para una persona, queremos demostrar una precisión en el suelo de menos de 30 pies (9 metros). Esta precisión abre la puerta a una amplia gama de conceptos de misión para futuras exploraciones».
Al hacer un uso eficiente de los datos de LOLA, un dispositivo portátil podría programarse con un subconjunto local de datos de terreno y elevación para conservar la memoria. Según el trabajo publicado por el investigador de Goddard Erwan Mazarico, un explorador lunar puede ver como máximo hasta unas 180 millas (300 kilómetros) desde cualquier lugar sin obstrucciones en la luna. Incluso en la Tierra, la tecnología de ubicación de Yew podría ayudar a los exploradores en terrenos donde las señales de GPS están obstruidas o sujetas a interferencias.
El sistema de geolocalización de Yew aprovechará las capacidades de GIANT (Herramienta de navegación y análisis de imágenes de Goddard). Esta herramienta de navegación óptica desarrollada principalmente por el ingeniero de Goddard, Andrew Liounis, revisó y verificó previamente los datos de navegación para la misión OSIRIS-REx de la NASA para recolectar una muestra del asteroide Bennu.
A diferencia de las herramientas de radar o láser que pulsan señales de radio y luz en un objetivo para analizar las señales de retorno, GIANT analiza imágenes de forma rápida y precisa para medir la distancia hacia y entre puntos de referencia visibles. La versión portátil es cGIANT, una biblioteca derivada del sistema autónomo de guía y control de navegación (autoGNC) de Goddard que proporciona soluciones de autonomía de misión para todas las etapas de las operaciones de naves espaciales y rover.
La combinación de interpretaciones de IA de panoramas visuales con un modelo conocido del terreno de una luna o un planeta podría proporcionar una poderosa herramienta de navegación para futuros exploradores.
Citación: La NASA desarrolla IA para navegar por la superficie lunar utilizando puntos de referencia (19 de diciembre de 2022) recuperado el 19 de diciembre de 2022 de https://phys.org/news/2022-12-nasa-ai-lunar-surface-landmarks.html
Este documento está sujeto a derechos de autor. Aparte de cualquier trato justo con fines de estudio o investigación privados, ninguna parte puede reproducirse sin el permiso por escrito. El contenido se proporciona únicamente con fines informativos.


