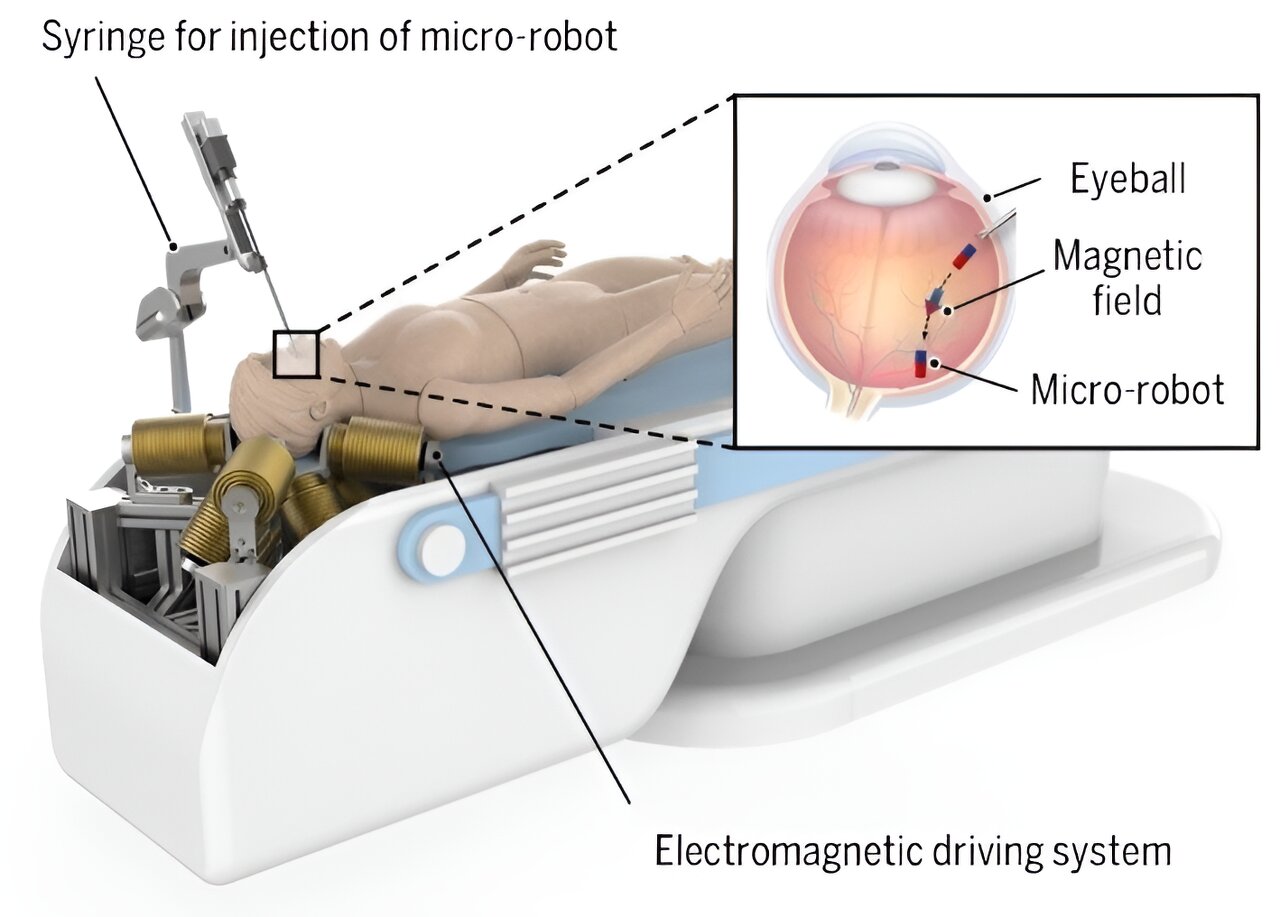
Un sistema de conducción electromagnético manipula un microrobot dentro del ojo posterior del paciente. Crédito: Científicos de la Escuela de Ingeniería Mecánica de la Universidad de Tianjin.
Un equipo de investigación ha presentado un novedoso sistema de conducción electromagnética que consta de ocho electroimanes optimizados dispuestos en una configuración óptima y emplea un marco de control basado en un controlador de rechazo activo de perturbaciones (ADRC) y un límite virtual. Se propusieron sistemas de conducción electromagnética para la manipulación magnética flexible de 5 grados de libertad de un microrobot dentro del ojo posterior, lo que permite una administración precisa de fármacos.
El equipo publicado sus hallazgos en Cyborg y sistemas biónicos el 23 de marzo de 2024.
La microcirugía intraocular ha sido testigo de una transición de la utilización de herramientas quirúrgicas portátiles convencionales a la adopción de la cirugía asistida por robot, debido a su capacidad para mitigar eficazmente los temblores fisiológicos de los cirujanos durante los procedimientos y lograr una escala de movimiento precisa.
Sin embargo, a medida que aumenta la proximidad al ojo posterior, los dispositivos asistidos por robots pueden colocar inadvertidamente los instrumentos demasiado profundamente o ejercer fuerzas esclerales excesivas bajo el control del cirujano, lo que puede traumatizar la retina o la esclerótica y provocar hemorragias o incluso lesiones graves. Las causas anteriores han dado lugar a una incidencia de complicaciones intraoperatorias y postoperatorias que oscilan entre el 2% y el 30%.
Estos sistemas de conducción electromagnética de 5 grados de libertad plantean un paradigma de actuación distinto en comparación con los sistemas asistidos por robots existentes. Por lo general, emplea un modo controlado por fuerza en lugar de un modo controlado por posición, lo que convierte al microrobot en un instrumento más seguro para interactuar dentro del ojo posterior.
En el modo controlado por fuerza, el sistema de conducción electromagnética puede mitigar eficazmente el riesgo de causar daño irreparable a la retina al imponer límites a las fuerzas que interactúan, incluso en situaciones que involucran movimiento del paciente o falla del sistema. Sin embargo, generar campos magnéticos y fuerzas magnéticas de alta intensidad dentro de un espacio de trabajo grande resulta un desafío.
Por lo tanto, la optimización del diseño de la configuración del sistema y los parámetros del electroimán para proporcionar un campo magnético alto y una capacidad de generación de fuerza magnética ha ido surgiendo y atrayendo una amplia atención. Además, el estudio de marcos de control adecuados también es necesario debido a las perturbaciones introducidas por muchos factores, como el modelado inexacto de bobinas electromagnéticas y los cambios en las fuerzas de interacción en el entorno líquido.
Para abordar los problemas mencionados anteriormente, los investigadores presentan un novedoso sistema de conducción electromagnética para la manipulación magnética de 5 DOF en microcirugía intraocular. Se ha presentado e implementado una optimización del diseño en dos pasos que intenta obtener la configuración óptima del sistema y los parámetros del electroimán para mejorar la capacidad de trabajo sostenido.
Con el procedimiento de optimización de la configuración propuesto y la optimización multiobjetivo de los electroimanes, el sistema puede realizar una manipulación más precisa y estable y ha obtenido una mayor capacidad de trabajo sostenido. Además, el sistema utiliza un marco de control que incorpora el controlador ADRC y un límite virtual para mejorar la solidez y la seguridad en la microcirugía intraocular.
Se han realizado simulaciones y análisis para evaluar las influencias del marco de control y optimización del diseño propuesto. Las pruebas de desempeño de evaluación del desempeño y seguimiento de trayectoria en diferentes modos de operación se implementan con el marco de control presentado que incorpora el controlador ADRC y el límite virtual, validando su desempeño y efectividad en comparación con los controladores PID y TDE.
Los resultados indican una disminución significativa tanto en el error máximo como en el error RMS máximo durante las pruebas de rendimiento sin perturbaciones, con reducciones que van del 47,1% al 65,4% y del 62,7% al 84,4%, respectivamente. Además, las pruebas de rendimiento realizadas en este trabajo también han tenido en cuenta perturbaciones que fueron pasadas por alto en otros trabajos relacionados.
Los resultados obtenidos demuestran la notable robustez del sistema en presencia de perturbaciones, como lo demuestra el error máximo y el error RMS inferiores a 172,2 y 35,8 μm, respectivamente.
De cara al futuro, los investigadores emplearán un modelo de corriente de campo magnético más preciso para mejorar aún más la precisión del posicionamiento y mejorar el espacio de trabajo utilizable dentro del volumen abierto. Además, el trabajo futuro también explorará la implementación de la detección en tiempo real de las temperaturas de los electroimanes basada en la rejilla de Bragg (FBG) de fibra, con el objetivo de mejorar las medidas de seguridad.
El equipo de investigación incluye a Yangyu Liu, Dezhi Song, Guanghao Zhang, Qingyu Bu, Yuanqing Dong y Chaoyang Shi de la Universidad de Tianjin, Tianjin; y Chengzhi Hu de la Universidad de Ciencia y Tecnología del Sur de Shenzhen.
Más información:
Yangyu Liu et al, Un novedoso sistema de conducción electromagnética para la manipulación de 5 DOF en microcirugía intraocular, Cyborg y sistemas biónicos (2023). DOI: 10.34133/cbsystems.0083
Proporcionado por el Instituto de Tecnología de Beijing Press Co., Ltd.
Citación: Investigadores desarrollan un sistema de conducción electromagnética para mejorar la microcirugía intraocular (31 de mayo de 2024) recuperado el 1 de junio de 2024 de https://medicalxpress.com/news/2024-05-electromagnetic-intraocular-microsurgery.html
Este documento está sujeto a derechos de autor. Aparte de cualquier trato justo con fines de estudio o investigación privados, ninguna parte puede reproducirse sin el permiso por escrito. El contenido se proporciona únicamente con fines informativos.













