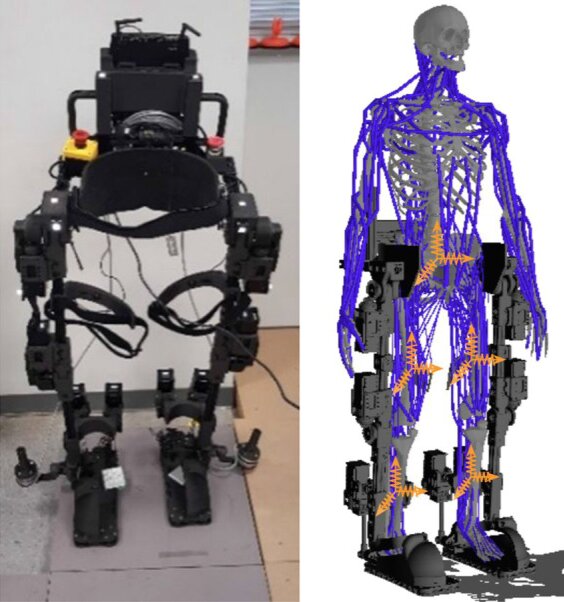
(Izquierda) El prototipo desarrollado del exoesqueleto robótico de la extremidad inferior (LE-RE). (Derecha) El modelo musculoesquelético y exoesquelético integrado. Los marcos de coordinación amarillos muestran los marcos de bujes fijados coincidentemente en el LE-RE y el modelo humano. Crédito: Luo S, et al. Revista de Neuroingeniería y Rehabilitación 20, no. 1 (2023): 1-19, fig. 1. Reproducido con permiso de Creative Commons Attribution 4.0 International License.
Un equipo de investigadores ha desarrollado un nuevo método para controlar los exoesqueletos de las extremidades inferiores mediante el aprendizaje por refuerzo profundo. El método titulado «Control de marcha robusto de un exoesqueleto de rehabilitación de extremidades inferiores junto con un modelo musculoesquelético a través del aprendizaje de refuerzo profundo», publicado en la revista Revista de Neuroingeniería y Rehabilitaciónpermite un control de la marcha más robusto y natural para los usuarios de exoesqueletos de extremidades inferiores.
Si bien los avances en la robótica portátil han ayudado a restaurar la movilidad de las personas con discapacidades en las extremidades inferiores, los métodos de control actuales para exoesqueletos tienen una capacidad limitada para proporcionar movimientos naturales e intuitivos a los usuarios. Esto puede comprometer el equilibrio y contribuir a la fatiga y la incomodidad del usuario. Pocos estudios se han centrado en el desarrollo de controladores robustos que puedan optimizar la experiencia del usuario en términos de seguridad e independencia.
Los exoesqueletos existentes para la rehabilitación de miembros inferiores emplean una variedad de tecnologías para ayudar al usuario a mantener el equilibrio, incluidas muletas y sensores especiales, según el coautor Ghaith Androwis, Ph.D., científico investigador principal en el Centro de Investigación de Ingeniería de Movilidad y Rehabilitación en Fundación Kessler y director del Laboratorio de Investigación y Robótica de Rehabilitación del Centro. Los exoesqueletos que funcionan sin tales ayudantes permiten una marcha más independiente, pero a costa de un peso adicional y una velocidad de marcha lenta.
«Los sistemas de control avanzados son esenciales para desarrollar un exoesqueleto de las extremidades inferiores que permita caminar de forma autónoma e independiente en una variedad de condiciones», dijo el Dr. Androwis. El novedoso método desarrollado por el equipo de investigación utiliza el aprendizaje de refuerzo profundo para mejorar el control del exoesqueleto. El aprendizaje por refuerzo es un tipo de inteligencia artificial que permite a las máquinas aprender de sus propias experiencias a través de prueba y error.
«Usando un modelo musculoesquelético junto con un exoesqueleto, simulamos los movimientos de la extremidad inferior y entrenamos el sistema de control del exoesqueleto para lograr patrones de caminata naturales mediante el aprendizaje por refuerzo», explicó el autor correspondiente Xianlian Zhou, Ph.D., profesor asociado y director de el Laboratorio de Biodinámica en el Departamento de Ingeniería Biomédica del Instituto de Tecnología de Nueva Jersey (NJIT). «Estamos probando el sistema en condiciones del mundo real con un exoesqueleto de miembros inferiores desarrollado por nuestro equipo y los resultados muestran el potencial para mejorar la estabilidad al caminar y reducir la fatiga del usuario».
El equipo determinó que su modelo propuesto generaba un controlador andante robusto universal capaz de manejar varios niveles de interacciones humano-exoesqueleto sin necesidad de ajustar parámetros. El nuevo sistema tiene el potencial de beneficiar a una amplia gama de usuarios, incluidos aquellos con lesiones de la médula espinal, esclerosis múltiple, accidente cerebrovascular y otras afecciones neurológicas. Los investigadores planean continuar probando el sistema con los usuarios y perfeccionar aún más los algoritmos de control para mejorar el rendimiento al caminar.
«Estamos entusiasmados con el potencial de este nuevo sistema para mejorar la calidad de vida de las personas con discapacidades en las extremidades inferiores», dijo el Dr. Androwis. «Al permitir patrones de caminata más naturales e intuitivos, esperamos ayudar a los usuarios de exoesqueletos a moverse con mayor facilidad y confianza».
Más información:
Shuzhen Luo et al, Control de marcha robusto de un exoesqueleto de rehabilitación de miembros inferiores junto con un modelo musculoesquelético a través del aprendizaje de refuerzo profundo, Revista de Neuroingeniería y Rehabilitación (2023). DOI: 10.1186/s12984-023-01147-2
Proporcionado por la Fundación Kessler
Citación: El sistema de control universal avanzado puede revolucionar el control del exoesqueleto de las extremidades inferiores y optimizar la experiencia del usuario (16 de junio de 2023) consultado el 17 de junio de 2023 en https://medicalxpress.com/news/2023-06-advanced-universal-revolutionize-limb-exoskeleton. html
Este documento está sujeto a derechos de autor. Aparte de cualquier trato justo con fines de estudio o investigación privados, ninguna parte puede reproducirse sin el permiso por escrito. El contenido se proporciona únicamente con fines informativos.










